









Lift-Rotary L90-12+R100

The RotoLinear Z(Lift) - θ (Theta) Positioning Module is a high performance dual-axis air bearing system that replaces bulkier conventional electro-mechanical actuators in pick-and-place applications. It combines the latest brushless servo motor, encoder and air bearing technologies to deliver precise, programmable position and speed control in an extremely compact package. This Z-θ stage utilizes 2-axis Planar and air bearing technologies. The drive, bearings and feedback are totally non-contact. The RotoLinear Stage has a hole-through to route auxiliary vacuum and electrical lines to the top surface of the stage. Can be installed on the Planar XY forcer to operate as robotic X-Y-Z-Theta cell.
Lift 12 mm, Unlimited rotation
|
Parameter |
R140-L140-10 |
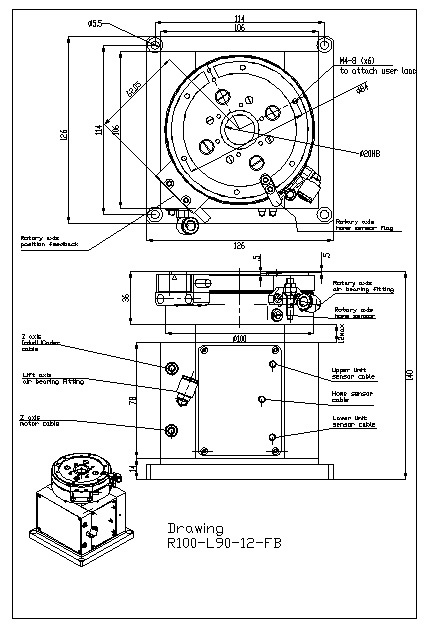
R100-L90-12 |
||||
|
|
Rotary axis |
Lift axis |
Rotary axis |
Lift axis |
||
|
Tabletop diameter |
140 mm |
- |
100 mm |
- |
||
|
Stage clear aperture |
36 mm |
20 mm |
||||
|
Torque / Force |
3 Nm |
140 N |
1 Nm |
90 N |
||
|
Motor |
direct drive brushless 2 –phase |
|||||
|
Control method (note 1) |
Closed loop servo (feedback required) open loop micro-stepping (feedback optional) |
|||||
|
Motor pole pitch |
1 deg |
1 mm |
1.5 deg |
1 mm |
||
|
Current per phase (note 2) |
3 Amp |
|||||
|
Travel range |
unlimited rotation |
10 mm |
unlimited rotation |
12 |
||
|
Motor resolution (note 3) |
3.6 arc-sec |
1 µm |
5.4 arc-sec |
1 µm |
||
|
Feedback resolution |
360,000 (note 4) counts/rev |
1 µm |
240,000 (note 4) 1,200,000 (note 5) counts/rev |
1 µm |
||
|
Repeatability unidirectional (no feedback) |
3 arc-sec |
5 µm |
3 arc-sec |
5 µm |
||
|
Repeatability (with feedback) |
3.6 arc-sec |
1 µm |
1 µm |
1 arc-sec |
||
|
Home/reference sensor |
FESTO SIEN-M5B (PNP or NPN output) |
|||||
|
Number of sensors |
One per rev |
One - Bottom pos. |
One per rev |
Three – top, middle, bottom pos. |
||
|
Rated speed (note 6) |
120 rpm |
200 mm/sec |
120 rpm |
100 mm/sec |
||
Bearing (axis/radial) |
air / air |
|||||
Air bearing pressure(note 7) |
3.2 Atm |
|||||
|
Bearing run-out/straightness |
5-10 µm |
|||||
Load weight |
8 Kg |
4 Kg |
||||
Stage weight |
5 Kg |
3.5 Kg |
||||
|
Material / finish |
anodized aluminum |
|||||
|
Operating temperature |
25 ºC |
|||||
|
|
||||||
|
Note 1 |
Control modes: micro-stepping open loop no feedback, open loop with position verification (requires micro-stepping drive) closed servo position loop (requires servo drive) |
|||||
|
Note 2 |
Reduce current to 50% after motion completion to reduce coil heating (open loop micro-stepping) |
|||||
|
Note 3 |
With micro-stepping drive 250 µsteps/step |
|||||
|
Note 4 |
Interpolated output, internal IntelLiCoder feedback, RS-422, 5V TTT, quadrature differential A+, A-, B+, B- |
|||||
|
Note 5 |
With external ring encoder RS-422, 5V TTT, quadrature differential A+, A-, B+, B- |
|||||
|
Note 6 |
Unloaded stage rated speed. Actual speed depends on load and amplifier bus voltage (Consult the factory) |
|||||
|
Note 7 |
Air supply must be clean, dry to 0° F dew point, and filtered to 0.25 µm or better |
|||||
