RZY-RTLA-90-200-LY-140H-300-RLTX40-220
 Click to enlarge |
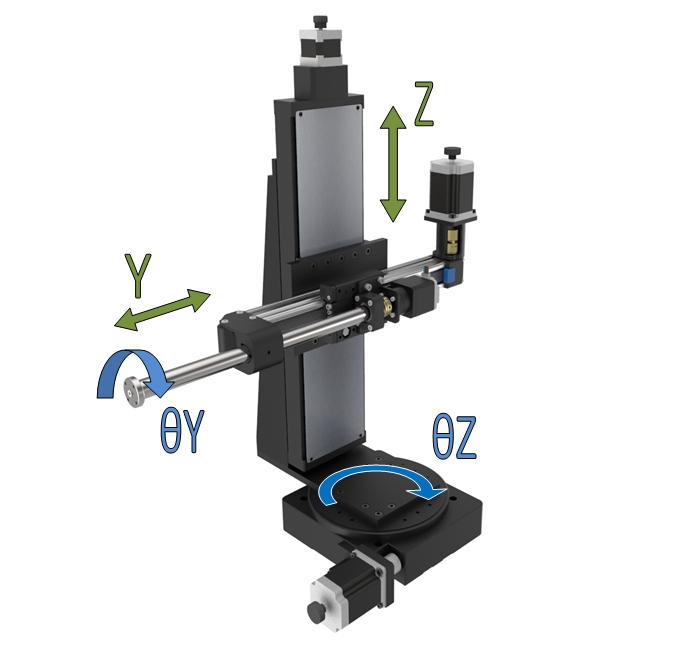
Y Stroke 320 mm Lift stroke 300 mm θY unlimited rotation θZ 240° Load 3 Kg |
A cylindrical robot has at least one rotary joint at the base and at least one prismatic joint to connect the links. Along the joint axis, the rotary joint uses a rotational motion; along the prismatic joint, it moves in a linear motion. Their movements occur within a cylindrical-shaped work envelope. Cylindrical robots are used for assembly operations, handling of machine tools and die-cast machines, and spot welding.
- Z stroke 50...600 mm
- Y stroke 50-320 mm
- θY unlimited rotation
- θZ 240°

|
θZ RTLA-90-200 |
Spec |
Lift Stage BSMA-LY-140H-300 |
Spec |
Y and θY RLTX40-220 |
Spec |
|
Rotation (degrees) |
240 |
Lift (mm) |
300 |
Stroke (mm)/Rotation (degrees) |
220/unlimited |
|
Repeatability (arcsec) |
45 |
Repeatability (µm) |
10 |
Repeatability (µm/arc-sec) |
50/60 |
|
Resolution (µm) |
Motor and driver dependent |
Resolution (arc-sec) |
Motor and driver dependent |
Load (kg) |
3 |
|
Weight (kg) |
9 |
Weight (kg) |
5.5 |
Weight (kg) |
3 |
|
Angular velocity (rpm) |
3 |
Max velocity (mm/sec) |
100 |
Velocity |
500/150 |
|
Mechanism, ratio |
worm gear 180:1; 90:1; 45:1 |
Mechanism, screw lead (mm) |
ball screw 4 |
Mechanism, ratio |
belt lead 75mm/ gear 63:17 |
|
Motor |
stepper/servo |
Motor |
stepper/servo/encoder/ Smart |
Motor |
stepper |
