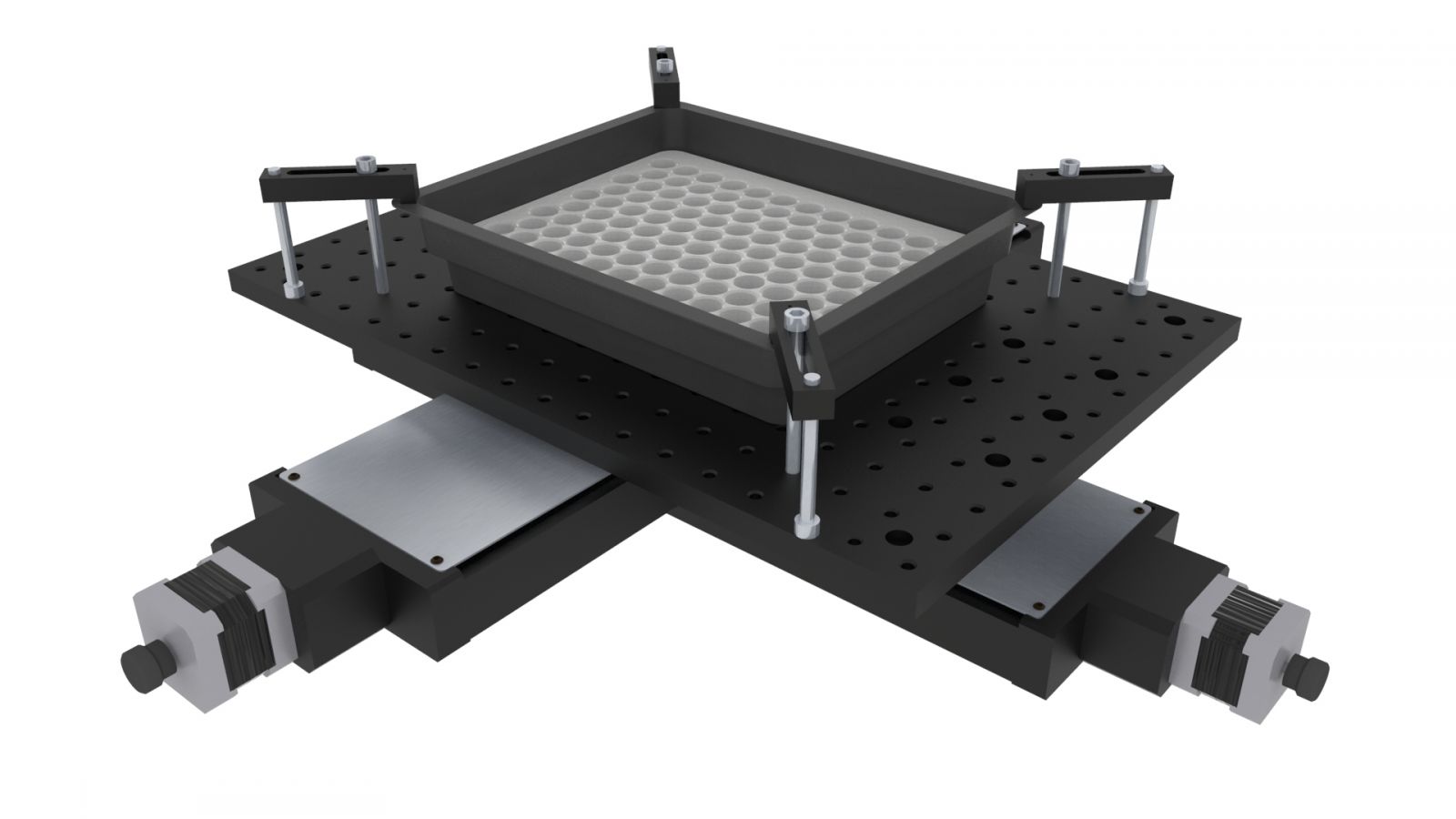
XY and XYZ stages for Pipetting Applications
 Click to enlarge |
XY(Z) stroke 100...600 mm (per axis) Load horizontal 15 Kg |
Pipetting Robots Configurations
XYZ robots are automated liquid-handling platforms that provide a range of solutions for preparing samples. They provide a common platform that allows scientists to easily share protocols and reproduce results. These robots automate experiments that scientists would otherwise need to perform manually, allowing them more time to answer important questions.
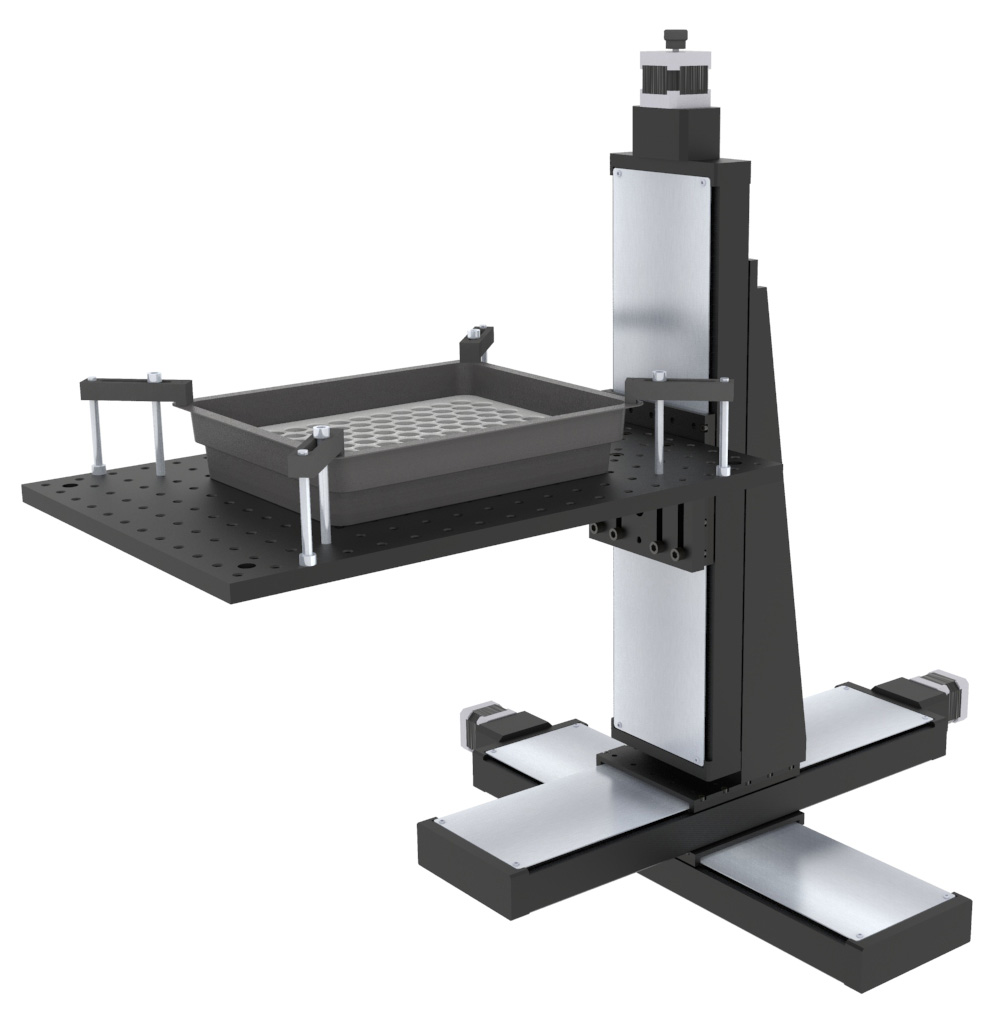
IntelLiDrives XYZ robots support interfaces to external I/O devices such as fluid pumps. An adaptor is also available for the XYZ robot that allows it to hold a Society for Biomolecular Screening (SBS)-standard multi-well plate. This system allows the user to perform pipetting applications such as automated microscopy with a high degree of resolution and repeatability.
The user can also change the placement and orientation of individual devices to provide a variety of configurations, and one stage can even be removed entirely to create an XY setup.
Robot Programming
Users programs pipetting sequences, using GUI (graphical user interface) with icon-based programming or writing sequence scripts with a VB-like language. No programming experience required to create complex pipetting sequences with interfaces to external pumps and other labware hardware.

USB interface and ability to receive/execute in real time commands over the USB port, allows robot to be integrated into complex laboratory automation systems.
| Actuator |
BSMA-LY-140H-XXX |
| Stroke X,Y,Z |
100 ... 600 mm |
| Ball screw lead |
4 mm |
| Motor mounts |
Nema17 |
| Motor type |
stepper servo with encoder (4000cpr) |
| Repeatability |
± 10 microns |
| Load capacity |
15 kg (horizontal) |
| Max screw speed |
10 RPS (stepper) 25 RPS (servo/encoder) |
RPS (rev/sec)
Speed in mm/sec = RPS x screw_lead
