









Rotary Tables SRT03-SRT10

|
ServoRing rotary tables provide superior angular positioning and are designed to eliminate backlash, friction and wear problems associated with worm, gear and belt drives. Low maintenance and high throughput characteristics of the ServoRing Stage yields the lowest total cost of ownership
Compact package and superior design of the ServoRing rotary stages was optimized to provide highest torque density in the smallest volume. ServoRing stage has clear center aperture that can be used for air or wire line feed-through or beam delivery
To maximize positioning performance ServoRing rotary tables utilizes direct drive three phase segmented brush-less motor technology which allows to optimize torque-speed performance of the stage. "Lo-Cog” magnetic design assures smooth rotation and dynamic performance.
Accurate Positioning performance is assured with precision encoder that provides sub arc-sec positioning resolution. The motor and rotary encoders are directly coupled to eliminate coupling backlash.
Precision preloaded ball bearing for combined axial and radial loads are used to maximize performance with respect to wobble and moment stiffness |
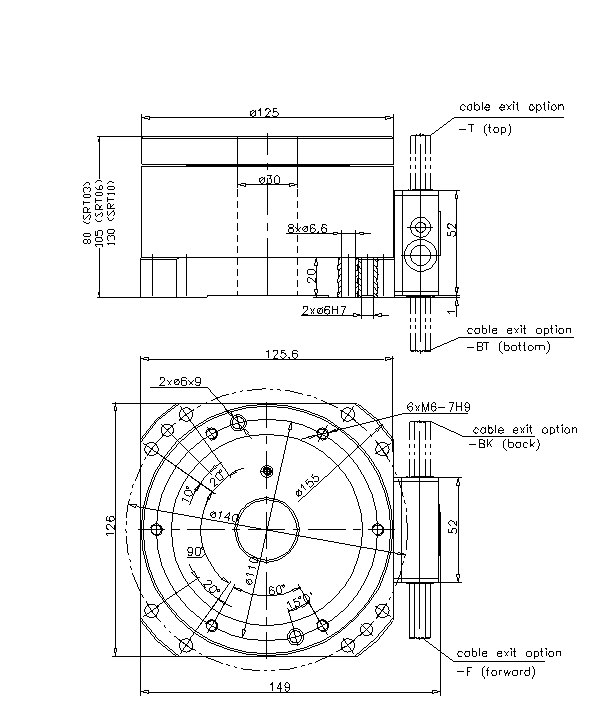
SRT03.061.25
SRT06.061.50
SRT10.061.75
 Rotary Tables SRT15-SRT45 SRT15-SRT45 Diameter 195 mm Aperture 65 mm Height 90 to 140 mm Load 150 kg |
 Rotary Tables SRT23-SRT67 SRT23-SRT67 Diameter 225 mm Aperture 95 mm Height 115 mm ... 165 mm Load 300 kg |
 Rotary Tables SRT01 SRT01 Diameter 115 mm Aperture 30 mm Height 70 mm Load 20 kg |
") Rotary table ACR-32UT (Ultrathin) ACR-32UT Diameter 116 mm Aperture 32 mm Height 22 mm |
 mSRT100-24 mSRT100-24 Diameter 100 mm Aperture 24 mm Height 57.5 mm Load 30 kg |
 SRT115-45-OR SRT115-45-OR Diameter 115 mm Aperture 45 mm Height 50 mm Load 50 kg |
|
|
|
Unit |
|
SRT03. 061.25 |
SRT06. 061.50 |
SRT10. 061.75
|
|
|
|
|
|
|||
|
Tabletop diameter |
|
mm |
115 |
125 |
||
|
Height |
|
mm |
70 |
80 |
105 |
130 |
|
Aperture |
|
mm |
30 |
|||
|
Motor type |
|
|
Three phase brushless Direct drive |
|||
|
Number of pole pairs |
P |
|
8 |
|||
|
Peak Torque (note 1) |
Tp |
Nm |
4 |
10 |
20 |
30 |
|
Continuous torque (note 2) |
Tc |
Nm |
1.5 |
3.5 |
7 |
10 |
|
Peak current |
Ip |
Amp |
14 |
|||
|
Continuous current |
Ic |
Amp |
6 |
|||
|
Sine encoder (note 3) standard optional |
|
Lines/rev |
2,048 10,000
|
|||
|
Digital encoder (note 4) standard optional |
|
Counts/rev |
409,600 409,600 to 2,000,000 |
|||
|
Axial load |
|
Kg |
30 |
|||
|
Bus voltage (Line voltage) |
V |
VDC VAC |
150 110 |
|||
|
Rated speed (note 5) |
Nc |
RPM |
800 |
|||
|
Radial/axial run-out (note 6) |
|
Microns |
20 (-N), 10 (-P), 5 (-SP) |
|||
|
Rotating inertia |
|
Kg·m2 |
0.0001 |
0.0002 |
0.0005 |
0.0007 |
|
Stage weight |
|
Kg |
2.5 |
3.8 |
5 |
6.2 |
|
Construction |
|
|
Rotor – steel Stator - aluminum |
|||
| Note 1 | 1sec. duration, coil at 20°C | |||||
| Note 2 | Coil at 120°C, convection (air) cooling | |||||
| Note 3 |
1Vpp differential, quadrature, index mark Interpolation factor (amplifier): x256, x512, x1024 Digitized resolution (amplifier) = Fundamental resolution * Interpolation Factor |
|||||
| Note 4 |
RS422, TTL, 5VDC, differential, quadrature, index mark Interpolation factor (encoder): x50 (standard), x100 Digital resolution (encoder) = Fundamental resolution * Interpolation Factor * 4 |
|||||
| Note 5 |
Rated speed based on amplifier bus voltage and motor “Y” winding. Higher speed (Δ) winding on request. Actual speed depends on the encoder resolution, interpolation factor, load, eddy current losses and bearing type |
|||||
| Note 6 | -N standard ABEC 5 bearing, -P precision ABEC 7 bearing, -SP special | |||||
